-

Aŭtomataj Rulseĝaj Alireblaj Veturiloj
Alta precizeca lasera mezura aparato uzata en aŭtomataj rulseĝoj povas helpi ĝin multmaniere.1.Alta preciza lasera mezurado povas esti uzata por helpi rulseĝojn percepti ĉirkaŭajn obstaklojn kaj mediojn, inkluzive de homoj, muroj, mebloj, pordoj, ktp. Instalante...Legu pli -
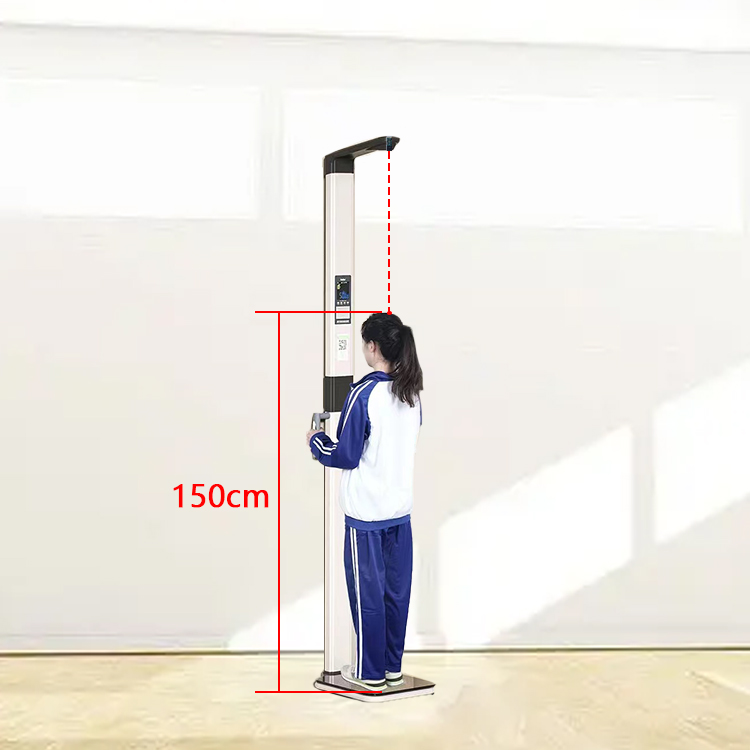
Homa Korpa Alteco Detekta Sistemo
Laseraj distancsensiloj povas esti vaste uzataj en sistemoj de detektado de alteco de homa korpo.Uzante la precizan distancsensilon, la alteco de la homa korpo povas esti precize mezurita en reala tempo. En la detekta sistemo de homa korpa alteco, la distanca lasersensilo povas esti metita ...Legu pli -

Laser Sensilo por Roboto
Kun la plibonigo de la vivokvalito de homoj, balaantaj robotoj eniris milojn da hejmoj kaj fariĝis bona helpanto por ĉies vivo.La lasera gamo-sensilo estas integrita al la balaa roboto, kio povas igi la balaan roboton eviti obstaklojn kaj turni ...Legu pli -

Sporta Mezura Sistemo
En sportaj konkursoj kaj testoj, kiel longsalto kaj pafĵeto, distancmezurado ofte havas grandajn erarojn pro homaj faktoroj.Por akiri precizajn sportajn mezurrezultojn, sporta mezursistemo bazita sur lasera intervalsensilo ...Legu pli -

Robota Cel-Poziciigado
Ĉar la kampo de robotiko daŭre evoluas, iĝas ĉiam pli grave trovi manierojn plibonigi la precizecon kaj precizecon de robotsistemoj.Unu maniero atingi tion estas per utiligado de laserdistancsensilo por robota celpoziciigado.Unue, lasera distancsensilo ofertas senekzempla...Legu pli -

Virabelo Monitorado
La malaltfortaj, altfrekvencaj kaj malgrand-grandaj laseraj intervalsensiloj de Seakeda estas vaste uzitaj en virabeloj.Kunportante seakeda laseran radaron en malsamaj pozicioj, la virabelo povas helpi ĝin realigi funkciojn kiel altecon determino kaj helpita surteriĝo.La longdistanca lidar c...Legu pli -

Robota Obstaklo Evitado
En la procezo de laboro aŭ moviĝado, la roboto daŭre renkontos diversajn obstaklojn, kiel fiksajn murojn, piedirantoj subite entrudiĝantaj, kaj aliajn porteblajn aparatojn.Se ĝi ne povas juĝi kaj respondi ĝustatempe, kolizio okazos.kaŭzi perdojn.La Seakeda lasera intervalsensilo ebligas la r...Legu pli
















